Cyrus Huang
I'm a Staff Research Scientist at Waymo. I build foundation models for autonomous systems, across perception, planning, and simulation. I obtained my PhD in Autonomous Systems at MIT CSAIL under the supervision of Prof. Brian Williams, Prof. John Leonard, and Dr. Guy Rosman. I was named a Qualcomm Innovation Fellow in 2021 and served as Tutorial and Lab Co-chair at AAAI 2023.
Email: xhuang at csail dot mit dot edu
Google Scholar // LinkedIn // GitHub

Recent Research

Xin Huang, Eric M. Wolff, Paul Vernaza, Tung Phan-Minh, Hongge Chen, David S. Hayden, Mark Edmonds, Brian Pierce, Xinxin Chen, Pratik Elias Jacob, Xiaobai Chen, Chingiz Tairbekov, Pratik Agarwal, Tianshi Gao, Yuning Chai, Siddhartha Srinivasa
Studies scaling laws for autonomous driving by scaling model parameters, datasets, and compute by orders of magnitude. First autoregressive transformer commercially deployed for autonomous driving, demonstrating strong planning and prediction capabilities in complex real-world scenarios through large-scale training.

Yi Xu, Yuxin Hu, Zaiwei Zhang, Gregory P. Meyer, Siva Karthik Mustikovela, Siddhartha Srinivasa, Eric M. Wolff, Xin Huang
Uses vision-language models as teachers to provide rich text and action supervision during training without requiring them at inference, leading to significant gains in end-to-end planning accuracy and collision reduction.

Haohong Lin, Xin Huang, Tung Phan-Minh, David S. Hayden, Huan Zhang, Ding Zhao, Siddhartha Srinivasa, Eric M. Wolff, Hongge Chen
A structure-guided diffusion model for traffic simulation that injects causal structures to balance realism and controllability, outperforming state-of-the-art methods across key metrics including collision rate, off-road rate, FDE, and comfort.
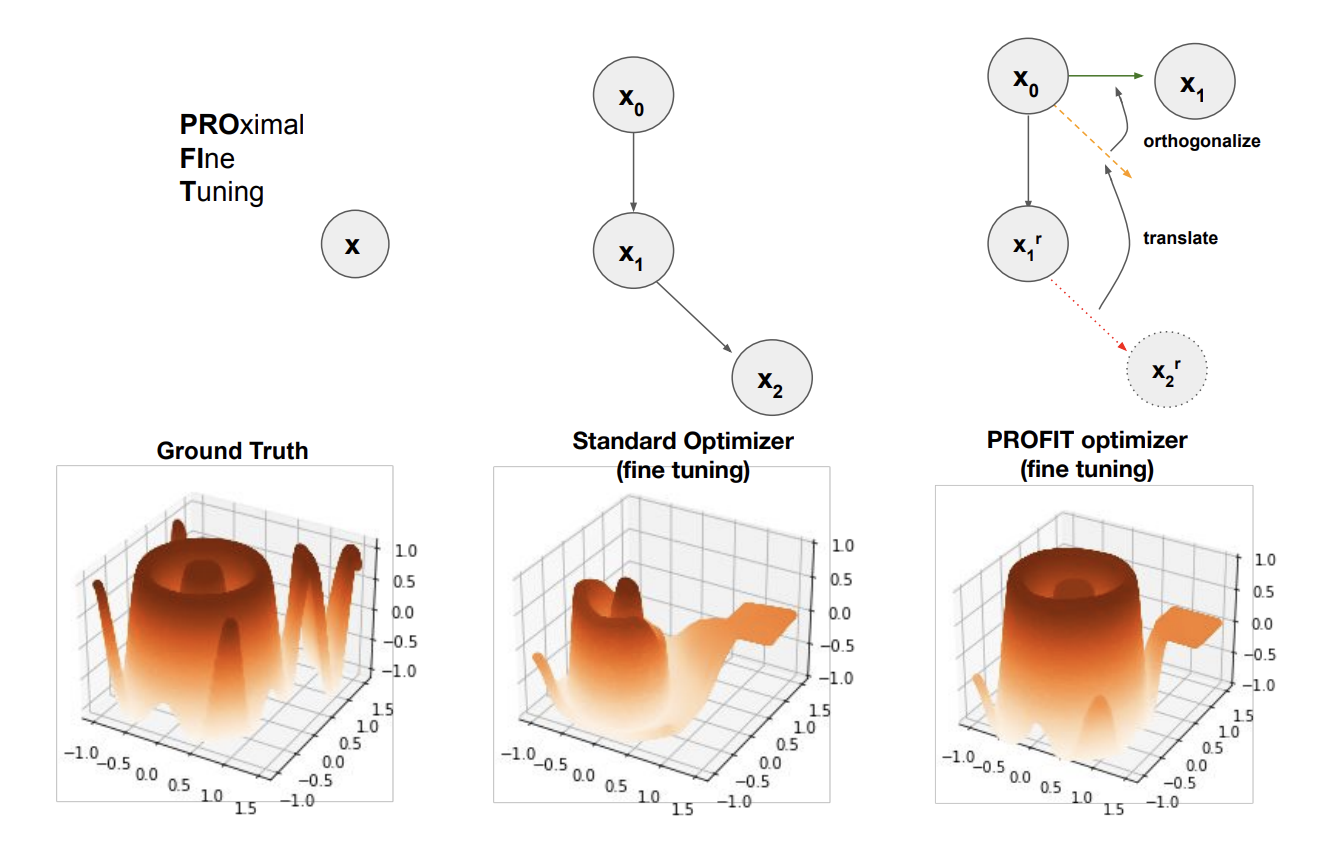
Anirudh S Chakravarthy, Shuai Kyle Zheng, Xin Huang, Sachithra Hemachandra, Xiao Zhang, Yuning Chai, Zhao Chen
A novel optimizer designed for incrementally fine-tuning converged models on new tasks or datasets, achieving strong results in large-scale vision, language, and motion tasks while avoiding catastrophic forgetting.

Yichen Xie, Hongge Chen, Gregory P. Meyer, Yong Jae Lee, Eric M. Wolff, Masayoshi Tomizuka, Wei Zhan, Yuning Chai, Xin Huang
A contrastive learning method that uses long-term LiDAR-based correspondence to pretrain coherent instance representations from BEV features, improving data efficiency and performance across perception, prediction, and planning tasks.
Selected Research

Qiao Sun*, Xin Huang*, Junru Gu, Brian C. Williams, Hang Zhao
Decouples joint prediction into marginal and conditional predictions for interacting agents, achieving state-of-the-art performance on the WOMD interactive prediction benchmark.

Xin Huang, Meng Feng, Ashkan Jasour, Guy Rosman, Brian Williams
Extends the soft actor-critic framework to estimate execution risk and produce risk-bounded policies by conditioning on continuous risk levels, achieving better plan quality and efficiency in complex scenarios.

Allen Wang, Xin Huang, Ashkan Jasour, Brian Williams
Fast non-sampling methods for risk assessment of autonomous vehicle trajectories under probabilistic predictions, handling both Gaussian and non-Gaussian models using numerical solvers, Chebyshev bounds, and SOS programming, with validation on Argoverse and CARLA datasets.

Xin Huang, Stephen McGill, Brian C. Williams, Luke Fletcher, Guy Rosman
A variational neural network that predicts future driver trajectory distributions with confidence estimates, improving physics-based prediction errors by 25% and identifying uncertain cases with 82% accuracy on real-world urban driving data.
News
- Stay tuned!